Bilgisayarlı Görü Nedir?
Bilgisayarlı görü, görüntülerden, videolardan veya nokta bulutlarından bilgi çıkarmak için kullanılan bir dizi tekniktir. Bilgisayarlı görü, görüntü tanıma, nesne algılama, etkinlik tanıma, 3B poz tahmini, video izleme ve hareket tahmini içerir. Gerçek dünyadaki uygulamalar arasında akıllı telefonlarda oturum açmak için yüz tanıma, sürücüsüz araçlarda yaya ve araçtan kaçınma ve tıbbi MRG’lerde tümör tespiti yer alır. MATLAB® ve Simulink® gibi yazılım araçları, bilgisayarla görme tekniklerini geliştirmek için kullanılır.
Nasıl Çalışır?
Bilgisayarlı Görü tekniklerinin çoğu, kapsamlı bir gerçek dünya verisi seti ve bir veri keşfi, model eğitimi ve algoritma geliştirme iş akışı kullanılarak geliştirilir. Görüntü işleme mühendisleri, ilgilendikleri özel soruna uyacak şekilde genellikle mevcut bir dizi tekniği değiştirirler. Bilgisayarlı Görü sistemlerinde kullanılan ana yaklaşım türleri aşağıda açıklanmıştır.
Derin Öğrenme Tabanlı Teknikler
Bilgisayarlı görüye yönelik derin öğrenme yaklaşımları, nesne algılama, nesne tanıma, görüntü bulanıklığını giderme ve sahne bölümleme için yararlıdır. Derin öğrenme yaklaşımları, farklı ölçeklerdeki kalıpları kullanarak doğrudan verilerden öğrenen kıvrımlı sinir ağlarının (CNN’ler) eğitimini içerir. CNN eğitimi, çok sayıda etiketli eğitim görüntüsü veya nokta bulutu seti gerektirir. Transfer öğrenimi, bu süreci daha az eğitim verisiyle hızlandırmak için önceden eğitilmiş ağları kullanır.

Özellik Tabanlı Teknikler
Özellik algılama ve çıkarma teknikleri, görüntü hizalama, video sabitleme, nesne algılama ve dahası. Görüntülerde, kullanışlı özellik türleri, tek tip yoğunluğa sahip kenarları, köşeleri veya bölgeleri içerir ve bu özellikleri BRISK, SURF veya ORB gibi dedektörlerle tanımlayabilirsiniz. Nokta bulutlarında, özdeğer tabanlı özellik çıkarıcıları veya hızlı nokta özellik histogramı (FPFH) çıkarıcıları kullanabilirsiniz.

Hareket eden bir uzay aracından alınan bir görüntüyü (sağdaki görüntü) bir referans görüntüyle (soldaki görüntü) karşılaştırmak için özellik eşleştirmeyi kullanma. (NASA’nın izniyle)
Görüntü İşleme
Görüntü işleme teknikleri genellikle bilgisayarlı görü iş akışında bir ön işleme adımı olarak uygulanır. Ön işleme türü göreve bağlıdır. İlgili görüntü işleme teknikleri şunları içerir:
• Renk dönüştürme veya düzeltme
• Görüntü yeniden boyutlandırma
• Düzeltme

Nokta Bulutu İşleme
Nokta bulutları, birlikte bir 3B şekli veya nesneyi temsil eden 3B uzayda bir dizi veri noktasıdır. Nokta bulutu işleme, tipik olarak, verileri analiz eden Bilgisayarlı Görü algoritmalarına hazırlanırken verileri önceden işlemek için yapılır. Nokta bulutu işleme genellikle şunları içerir:
• Düzensizden düzenli nokta bulutuna dönüştürme
• Düzeltme

3D Görüntü İşleme
3B görüntü işleme teknikleri, ayarlanmış bir kamerayla çekilmiş çoklu görüntüleri kullanarak bir sahnenin 3B yapısını tahmin eder. Bu görüntüler tipik olarak bir tek gözlü kamera veya stereo kamera çiftinden üretilir. 3B görüntü işleme teknikleri şunları içerir:
• Hareket İle Nesne Oluşturma (SfM)

Neden Önemlidir?
Bilgisayarlı görü, gerçek dünya uygulamalarının geniş yelpazesinde bir esastır. Bunlardan en yaygın olanlarından bazıları aşağıda tartışılmaktadır.
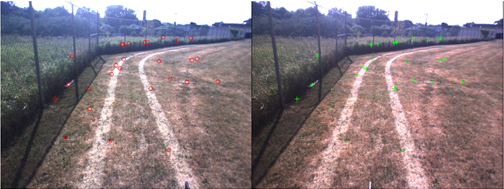
Otonom Sistemler
Havadan veya yerden otonom sistemler, ortamlarından görsel veya nokta bulutu verileri toplayan çeşitli sensör kullanır. Sistemler bu verileri, ortamı haritalamak için eşzamanlı yerelleştirme ve haritalama (SLAM) ve izleme gibi Bilgisayarlı Görü yetenekleriyle kullanır. Otonom sistemler bu haritaları yolları, patikaları veya binaları bölümlere ayırmak ve insanları ve araçları tespit etmek ve izlemek için kullanabilir. Örneğin BMW, çevredeki araçları tasvir etmek ve türlerini belirlemek için Destekli Sürüş Görünümü’ndeki (ADV) Bilgisayarlı Görü özelliklerini kullanır.

Endüstriyel Uygulamalar
Görüntü işleme, parça kalitesi izleme ve altyapı bakımı gibi üretim uygulamalarında kullanılır. Örneğin Shell, makinelerdeki etiketleri tanımlamak için eğitimli bölgesel evrişimli sinir ağları (R-CNN’ler) kullandı. TimkenSteel aynı yetenekleri kalite kontrol için de kullandı ve üretim sırasında kalitesiz veya kusurlu parçaları tespit etti.

İnşaat ve Tarım
Bilgisayarlı görü, inşaat ve tarımda havadan yakalanan altyapı veya arazi verilerinden bilgi çıkarmak için kullanılır. Hava platformlarından görüntüleri, nokta bulutlarını veya hiperspektral verileri analiz etmek için spektral imza haritalama, nesne algılama ve bölütleme gibi Bilgisayarlı Görü yetenekleri uygulanır. Japonya’daki Yachiyo Engineering, anlamsal bölütleme ile baraj ve köprülerdeki hasarı tespit etmek için bu yetenekleri kullanır. Çiftçiler ayrıca çiftliklerinin hiperspektral görüntülerini alan dronları kullanarak mahsul sağlığını analiz ediyor.

Fotoğrafçılık
Kameralarda ve akıllı telefonlarda Bilgisayarlı görünün kullanımı son on yılda büyük ölçüde arttı. Bu cihazlar, yüzlere odaklanmak için yüz algılama ve izlemeyi ve panoramalar oluşturmak için birleştirme algoritmalarını kullanır. Cihazlar ayrıca saklanan bilgilere erişmek için optik karakter tanıma (OCR) veya barkod veya QR kod tarayıcıları entegre eder.

MATLAB ile Bilgisayarlı Görü
MATLAB’deki Image Processing Toolbox™, Computer Vision Toolbox™ ve Lidar Toolbox™, Bilgisayarlı Görü yeteneklerinizi oluşturmak için kullanabileceğiniz uygulamalar, algoritmalar ve eğitilmiş ağlar sağlar. Görüntü veya nokta bulutu verilerini içe aktarabilir, önceden işleyebilir ve verileri analiz etmek için yerleşik algoritmaları ve derin öğrenme ağlarını kullanabilirsiniz. Araç kutuları, başlamanız için size örnekler sunar.
MATLAB Kullanarak Hata Tespiti
Makine parçaları, elektronik devreler veya diğerleri gibi nesnelerdeki anormallikleri ve kusurları tespit etmek için Görüntü İşleme Ürünü’nü kullanabilirsiniz. Görüntü İşleme Araç Kutusundaki görüntü ön işleme algoritmalarından başlayarak, hizalamayı düzeltme, renge göre bölümlere ayırma ve görüntü yoğunluğunu ayarlama gibi yetenekleri kullanarak doğru özellikleri algılama şansınızı artırabilirsiniz.
Kusur algılama adımı genellikle derin öğrenme kullanılarak gerçekleştirilir. Derin öğrenmeye yönelik eğitim verileri sağlamak için anlamsal bölütleme veya örnek bölümleme maskeleri oluşturarak verileri etiketlemenize yardımcı olan MATLAB görüntü, video veya lidar etiketleme uygulamalarını kullanabilirsiniz. Daha sonra sıfırdan veya transfer öğrenmeyi kullanarak bir derin öğrenme ağını eğitebilirsiniz. Daha sonra nesneleri anormalliklere veya kusurlara göre sınıflandırmak için eğitilmiş ağı veya önceden eğitilmiş birkaç ağdan birini kullanabilirsiniz.

MATLAB Kullanarak Nesne Tespiti ve İzleme
Nesne algılama ve izleme, araçları veya insanları algılama, barkodları okuma ve sahnelerdeki nesneleri algılama gibi uygulamalar için Bilgisayarlı görünün en iyi bilinen kullanımlarından biridir. YOLO v3 kullanan arabaları algılamak gibi uygulamalar için MATLAB‘de derin öğrenme ağları oluşturmak üzere Deep Network Designer’ı kullanabilirsiniz. Etiketli eğitim verilerini yüklersiniz, verileri önceden işlersiniz, YOLO v3 ağını tanımlar, eğitirsiniz ve kesinlik veya isabetsizlik oranını temel gerçek verilerine göre değerlendirirsiniz. Ardından, arabaları algılamak ve etraflarında sınırlayıcı kutular görüntülemek için ağı kullanabilirsiniz.

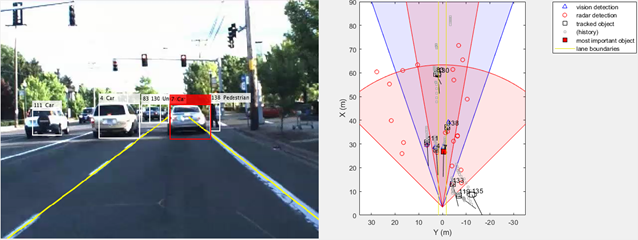
Otonom Sistem Simülasyonunda Bilgisayarlı görü ve Simulink Kullanımı
Karar vermek için robotik veya otonom bir sistemde Bilgisayarlı görü ile nesne tespit ve izleme sonuçlarını kullanabilirsiniz. Duyucu tümleştirme otonom acil frenleme (AEB) örneği, Bilgisayarlı Görü yeteneklerini entegre eden Simulink modellerini oluşturmanın kolaylığını gösterir. Model iki parça kullanıyor: bir aracın önündeki engelleri algılamak için bir Bilgisayarlı görü ve uyucu tümleştirme modeli ve sürücüyü uyarmak ve otomatik olarak frene basmak için bir önden çarpışma uyarısı (FCW) sistemi. Bu, bilgisayarlı görü algoritmalarını daha geniş bir sistem simülasyonuna entegre etmek için Simulink’i nasıl kullanabileceğinizi gösterir.
Görüntü İşleme Araç Kutusu ile Yerelleştirme ve Haritalama
Kamera konumlarını tahmin etmek ve görsel eşzamanlı yerelleştirme ve haritalamayı (vSLAM) kullanarak ortamı haritalamak, hareket ile nesne oluşturma (SfM) kullanarak nesnelerin 3B modellerini oluşturmak ve derinliği tahmin etmek için MATLAB’dan Bilgisayarlı görüyü kullanabilirsiniz.
MATLAB’ de imageDatastore ve bagOfFeatures gibi yerleşik yetenekleri kullanarak ortamı haritalarken bir stereo kamera çiftinin konumunu tahmin edebilirsiniz.
Görüntü çifti arasında eşleşen özellikleri belirleyerek haritayı başlatırsınız ve ardından sahnede hareket ederken kameranın konumunu ve yönünü hassaslaştırmak için dizi ayarlamayı kullanarak kamera konumunu ve haritadaki özellik konumlarını tahmin edersiniz.
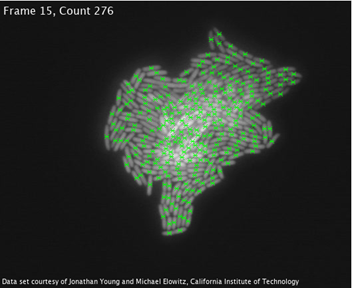
Nesne Sayma
Bir görüntü veya videodaki nesneleri saymak için Bilgisayarlı görüyü de kullanabilirsiniz. Hücre sayımı örneğinde, hücreleri bölümlere ayırmak, blob analizi kullanarak hücre merkezlerini bulmak ve bulunan merkezlerin sayısını saymak için morfolojik işleçler uygularsınız. Daha sonra bu işlemi videodaki her kare için tekrarlıyorsunuz.
Görüntü Segmenter ve Renk Eşiği uygulamaları gibi MATLAB’deki uygulamalar, bir görüntüdeki nesneleri bölümlere ayırmak için etkileşimli bir kullanıcı arabirimi sağlar. Image Zone Analyzer uygulaması, bir görüntüdeki nesneleri saymaya ve alan, kütle merkezi ve diğerleri gibi özelliklerini hesaplamaya yardımcı olur.